Problem
- 목적은 loss, error function을 최소화하는 θ값을 구하는 것이다.
Gradient Descent
간단한 정리
역전파에서 간단히 다루었다.
f는 error function이다.
Interpretation
모두를 위한 컨벡스 최적화 참고
gradient descent는 함수를 2차 식으로 근사한 뒤, 그 함수의 최소 위치를 다음 위치로 선택하는 방법이다.
f를 2차 Taylor로 전개한다.
f(y)≈f(x)+∇f(x)⊤(y−x)+21∇2f(x)∣∣y−x∣∣22
헤시안을 t1로 대체한다.
f(y)≈f(x)+∇f(x)⊤(y−x)+2t1∣∣y−x∣∣22
- 이때 2t1∣∣y−x∣∣22 항은 x 에 대한 proximity term 이다.
proximity term은 얼마나 가까운가를 나타낸다.
즉 현재 x 에서 크게 벗어나지 않도록 제한한다.
- 이 식의 최소 값을 구한다. 이는 다음의 x값이 된다.
xk+1=yargminf(xk)+∇f(xk)⊤(y−xk)+2t1∣∣y−xk∣∣22
Stochastic Gradient Descent
- 앞선 gradient descent방법으로 이야기해보자.
- 에러 함수는 오차의 합으로 구성된 함수의 합이다.
- 이를 gradient descent로 풀어내려면 함수들의 gradient를 합산하여 구한다.
- 이후 업데이트한다.
모두를 위한 컨벡스 최적화 참고
x(k)=x(k−1)−tk⋅i=1∑m∇fi(x(k−1)),k=1,2,3,…
- 그러나 이 방법에는 문제점이 있다.
- 모든 데이터를 가지고 gradient를 구하는 것은 문제가 된다.
- 요즘에는 거대한 데이터를 인풋으로 사용한다. 메모리에 올라가기도 힘들다.
- 즉 계산 오버헤드가 크게 증가한다.
gradient descent를 batch update라고 부른다.
- 이를 해결하기 위해 다음과 같은 방식이 제안된다.
Mini-Batch gradient descent
- 이름 그대로 스텝이 진행될 때 모든 배치를 사용하지 않는다.
- 두가지 방법으로 나눌 수 있다.
- mini-batch
- 작은 개수의 샘플을 이용한다. ( 128, 256 …)
- stochastic gradient
사실상 크게 이름을 구분하지 않고 혼용해서 쓴다.
![]()
https://towardsdatascience.com/gradient-descent-algorithm-and-its-variants-10f652806a3
Challenges
- step size를 결정하는데 어려움이 있다.
- 작다면 너무 느려진다.
- 크다면 빠르나 끝에 가서 크게 요동친다.
- fluctuation in the object function
- learning rate를 스케줄 한다.
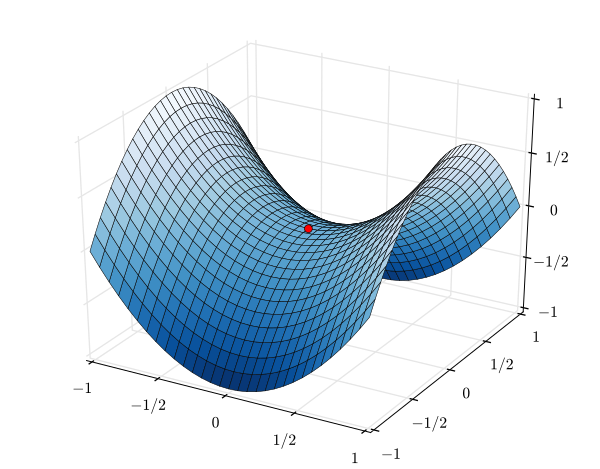
- local minima 나 saddle points에 걸리면 나오기 힘들다.
![]()
Exponentially Weighted Moving Average
기본 식
- 전 스텝의 값과 새로운 값의 convex sum이다.
vt=βvt−1+(1−β)θt - β 는 하이퍼 파라미터 (0 ~ 1)
- vt−1은 이전 Moving average
- θ는 현재 구해진 값
정리
- v0부터 진행해보자.
v1=βv0+(1−β)θ1=(1−β)θ1
v2=βv1+(1−β)θ2=β(1−β)+(1−β)θ2=(1−β)(βθ1+θ2)
- 계속 진행하면 다음과 같은 식으로 정리 가능하다.
vt=(1−β)(βt−1θ1+βt−2θ1+⋯+θt) - 1−β1 개의 샘플을 이용한 평균의 근사 값이다.
- 오래된 데이터는 제곱 값이 매우 작아져 값이 빠르게 작아진다.
![]()
Bias Correction
- 초기 값이 0부터 시작되어 bias가 발생한다.
- 1−βtvt를 vt대신 사용한다.
자세한 설명 참고
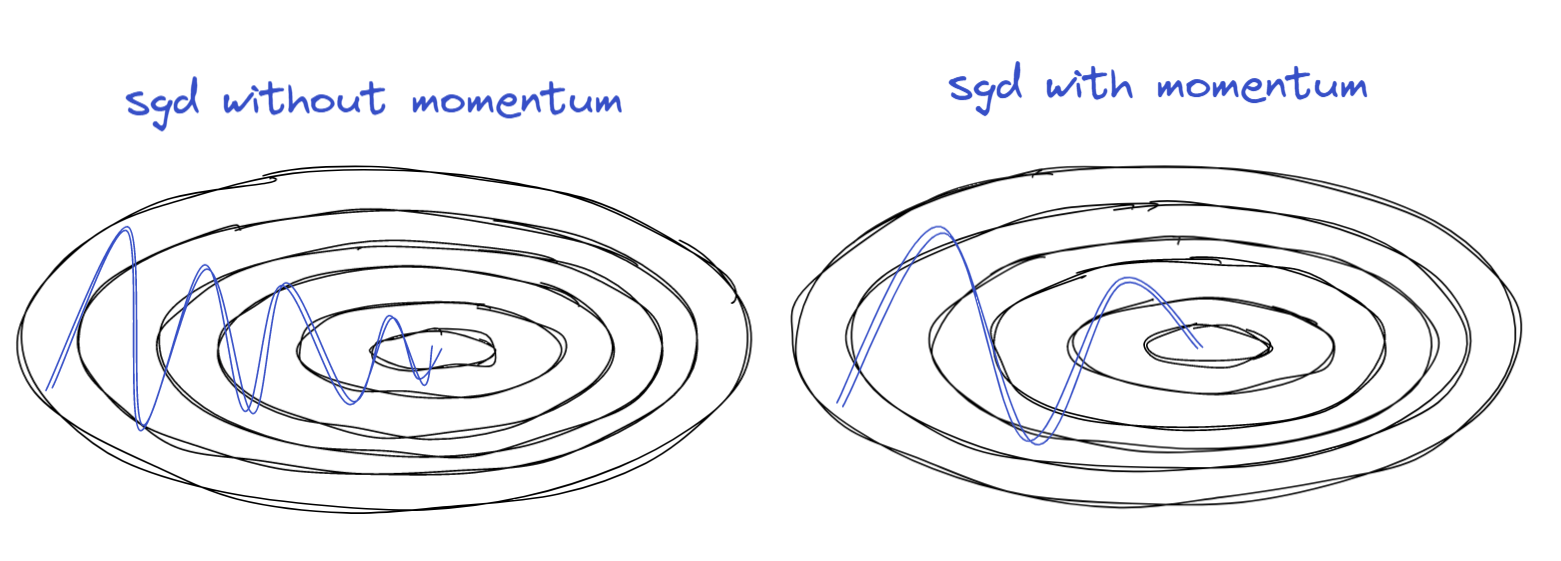
- 이 방법을 gradient descent에 적용한 것이 모멘텀이다.
Momentum
- gradient의 moving avg를 이용해서 업데이트함
vt+1=βvt+(1−β)[∇J(θt)]
θt+1=θt−αvt+1
- 이전 세대의 gradient값이 같은 방향을 계속 가르키면 가속화된다.
![]()
장점
- 모멘텀 최적화가 경사 하강법보다 빠르다.
- 빠르게 평편한 지역을 탈출하게 만든다.
- 지역 최적점을 건너 뛰는데 효과가 있다.
- 안정되기 전까지 모멘텀 때문에 진동을 하기 때문이다.
핸즈온 머신러닝 p.436
RMSProp
- gradient 값의 제곱에 moving avg를 적용함
- RMSProp = Rprop + SGD
- adaptive individual learning rate for each weight
algorithm
rt+1=βrt+(1−β)[∇J(θt)]2 (element-wise square)
vt+1=rt+1+ε∇J(θt) (element-wise division)
θt+1=θt−αvt+1
- 만약에 gradient 값이 크면, 그만큼 나눠져서 값이 작아짐
정리
- 지수 가중 평균을 이용 -> 경향성 반영
- 루트로 나누어 학습에 제약을 둠 -> adaptive learning rate
- 불필요한 진동 감소 및 Gradient Exploding 막음
ADAM
- ADAM = momentum + bias correction + RMSProp
algorithm
vt+1=βvt+(1−β)[∇J(θt)]
rt+1=βrt+(1−β)[∇J(θt)]2 (element-wise square)
vtbc=1−β1tt (bias correction)
rtbc=1−β2tr (bias correction)
θt+1=θt−αrtbcvtbc
- 여기서 rtbcα 값이 adaptive learning rate이다.
정리
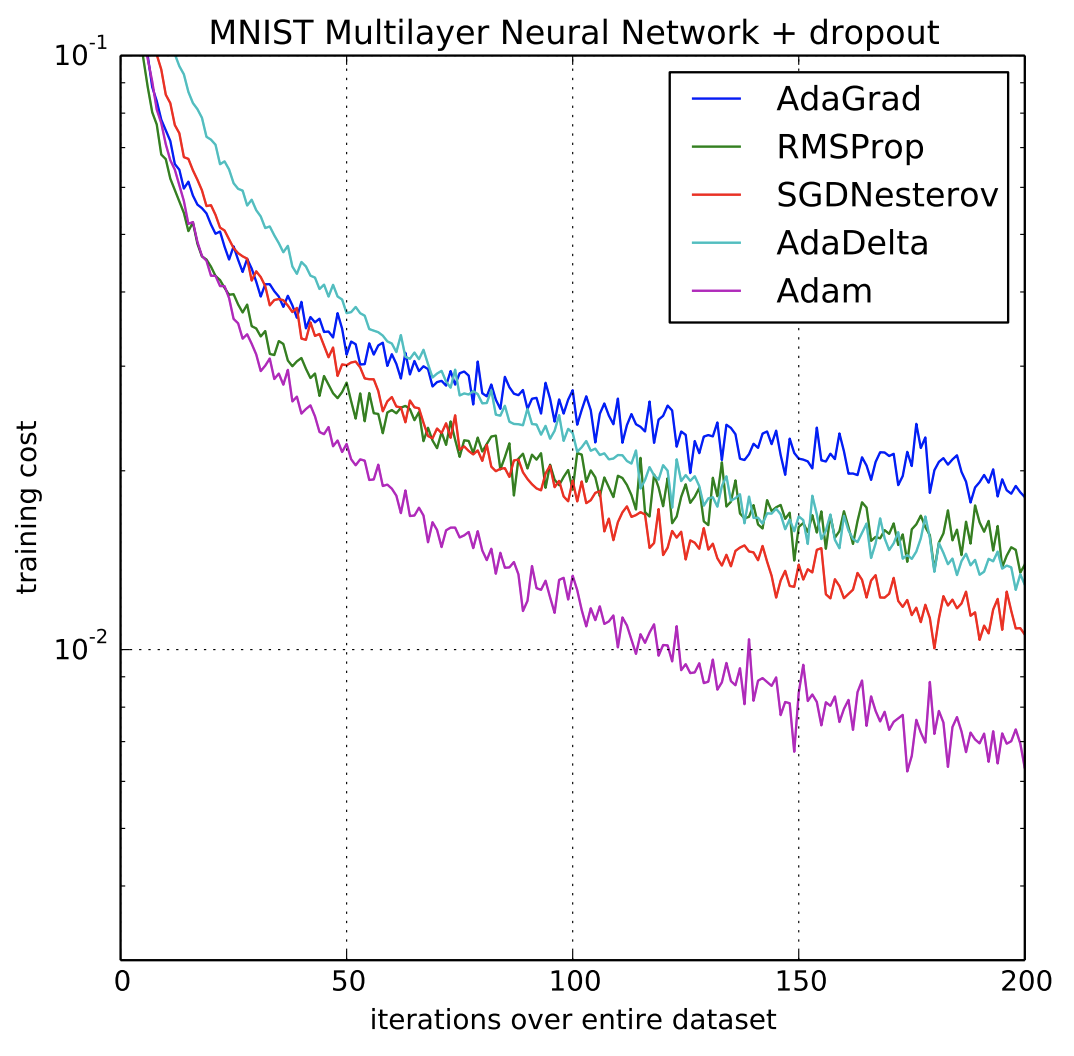
- adam은 가장 많이 사용되고 있는 옵티마이저이다.
- 성능 또한 좋다.
- 하이퍼 파라미터 지정에 대한 부담이 적다. -> adaptive 특성
![]()
- 중간 중간 빠진 옵티마이저는 다음 그림을 통해 살펴보자.
![]()
Learning Rate Decay
- step size를 step마다 줄여줌
- 1 epoch는 한번 학습된 것이다. ( batch라면 전체 데이터를 한번 트레이닝함 )
- μ = decay rate, Ω =epoch num
여러 방법들
α=1+μΩ1α0
α=0.95Ωα0
α=Ωkα0
α=tkα0